I servomotori
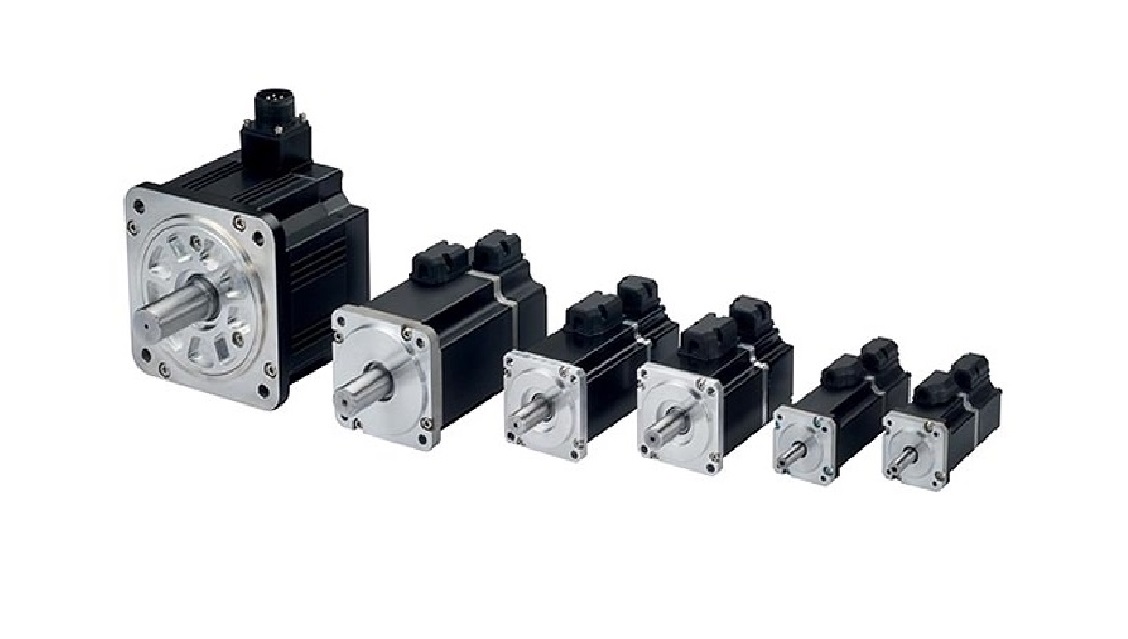
A. Costantini | (la videolezione) Mentre i comuni motori elettrici funzionano continuamente e fungono da fonte di forza motrice nei macchinari, i servomotori incorporano un meccanismo di controllo e sono in grado di ruotare di un angolo specificato e fermarsi in una posizione precisa. Queste capacità hanno portato al loro utilizzo nel controllo delle apparecchiature in campi diversi come l'industria e l'hobbistica, con applicazioni che vanno dal posizionamento dei giunti nei robot industriali al controllo dell'angolo del timone su velivoli radiocomandati. I servomotori prendono il nome dal fatto che si può fare affidamento sul loro funzionamento "esattamente come comandato". Qualsiasi motore elettrico in grado di controllare parametri come posizione e velocità può essere definito servomotore, indipendentemente da come viene ottenuto questo controllo. Tuttavia, i servomotori in senso stretto dispongono di un encoder o di un potenziometro in grado di determinare la loro posizione di rotazione e utilizzare queste informazioni per eseguire il controllo di retroazione della posizione del motore. Ciò fornisce una precisione di arresto precisa e la possibilità di tornare alla sua posizione originale se si verifica una deviazione della posizione del motore quando è fermo.
Questi motori possono funzionare a velocità elevate e fornire anche una coppia affidabile su un'ampia gamma di velocità, da bassa ad alta. La tecnologia dei servomotori è notevolmente avanzata insieme ai progressi nei robot industriali. L'interesse per l'automazione di fabbrica iniziò a crescere negli Stati Uniti a partire dagli anni '50, coinvolgendo inizialmente meccanismi come nastri trasportatori, macchine automatiche e robot industriali. Sebbene i primi macchinari automatizzati e robot industriali tendessero a utilizzare l'idraulica o la pneumatica per controllare il posizionamento dell'attuatore, presentavano problemi in termini di precisione, affidabilità operativa, impianto idraulico associato e perdite di fluido idraulico o aria. Successivamente, l'uso dei servomotori CC è cresciuto negli anni '50 e '60 con il miglioramento della loro tecnologia e hanno iniziato a essere montati nei robot industriali al posto dei fastidiosi meccanismi idraulici e pneumatici. I servomotori CA sono emersi negli anni '80. I loro vantaggi pratici includono la realizzazione di robot più piccoli e leggeri e, di conseguenza, ora costituiscono la maggior parte dei servomotori utilizzati nei moderni macchinari industriali. I servomotori possono essere raggruppati in servomotori CC e servomotori CA
Servomotori CC
Si tratta di servomotori azionati da un motore a corrente continua (CC) con spazzole. Sebbene i motori a corrente continua siano più facili da controllare rispetto a quelli a corrente alternata e siano stati ampiamente utilizzati in passato per le loro dimensioni ridotte e il basso costo, negli ultimi tempi i progressi nella tecnologia di controllo dei motori a corrente alternata hanno visto meno opportunità per il loro utilizzo.
Servomotori AC
Si tratta di servomotori azionati con un motore a corrente alternata (AC). Sebbene il loro controllo sia più complesso di quello dei motori CC, i progressi nella tecnologia di controllo hanno consentito loro di essere il tipo più comune di servomotore.
A seconda del meccanismo di azionamento, i servomotori AC possono essere suddivisi in motori sincroni e motori asincroni. La differenza si basa sul fatto che abbiano o meno un magnete permanente. I primi incorporano un magnete permanente. Per aumentare la potenza del motore occorre aumentare la grandezza dei magneti permanenti che, essendo costosi, ne fanno lievitare il prezzo. Per questo motivo sono ampiamente utilizzati per applicazioni a bassa potenza (fino a 10kW). Tuttavia, con l'emergere di magneti permanenti ad alte prestazioni negli ultimi anni, i servomotori AC sincroni sono ora l'opzione predefinita. Gli asincroni non utilizzano magneti permanenti e tendono ad essere utilizzati in applicazioni con potenza superiore (10 kW o più).
Applicazioni per servomotori
Data la loro caratteristica di posizionamento accurato, i servomotori hanno un'ampia gamma di impieghi in applicazioni quali robot industriali e macchinari di precisione. Esempi di applicazione includono:
- Giunti robot industriali
- Articolazioni robot umanoidi
- Controllo delle apparecchiature nelle macchine per la lavorazione degli alimenti
- Controllo delle apparecchiature nelle macchine per l'imballaggio
- Azionamenti a cinghia nei sistemi di trasporto
- Porte automatiche nei treni
- Tavole XY utilizzate nelle macchine di ispezione LCD e semiconduttori
- Presse/alimentatore a rulli
- Stadi rotanti per macchine utensili o sistemi di ispezione
- Controllo delle presse
- Controllo delle macchine incollatrici
- Controllo di macchine per lo stampaggio della plastica
- Controllo di macchine da divertimento
- Radiocomando e altre applicazioni per hobby
- Macchine per rivestimento o deposizione di vapore
- Macchine pulitrici rotanti per LCD e semiconduttori