Controllo di un robot a tre assi
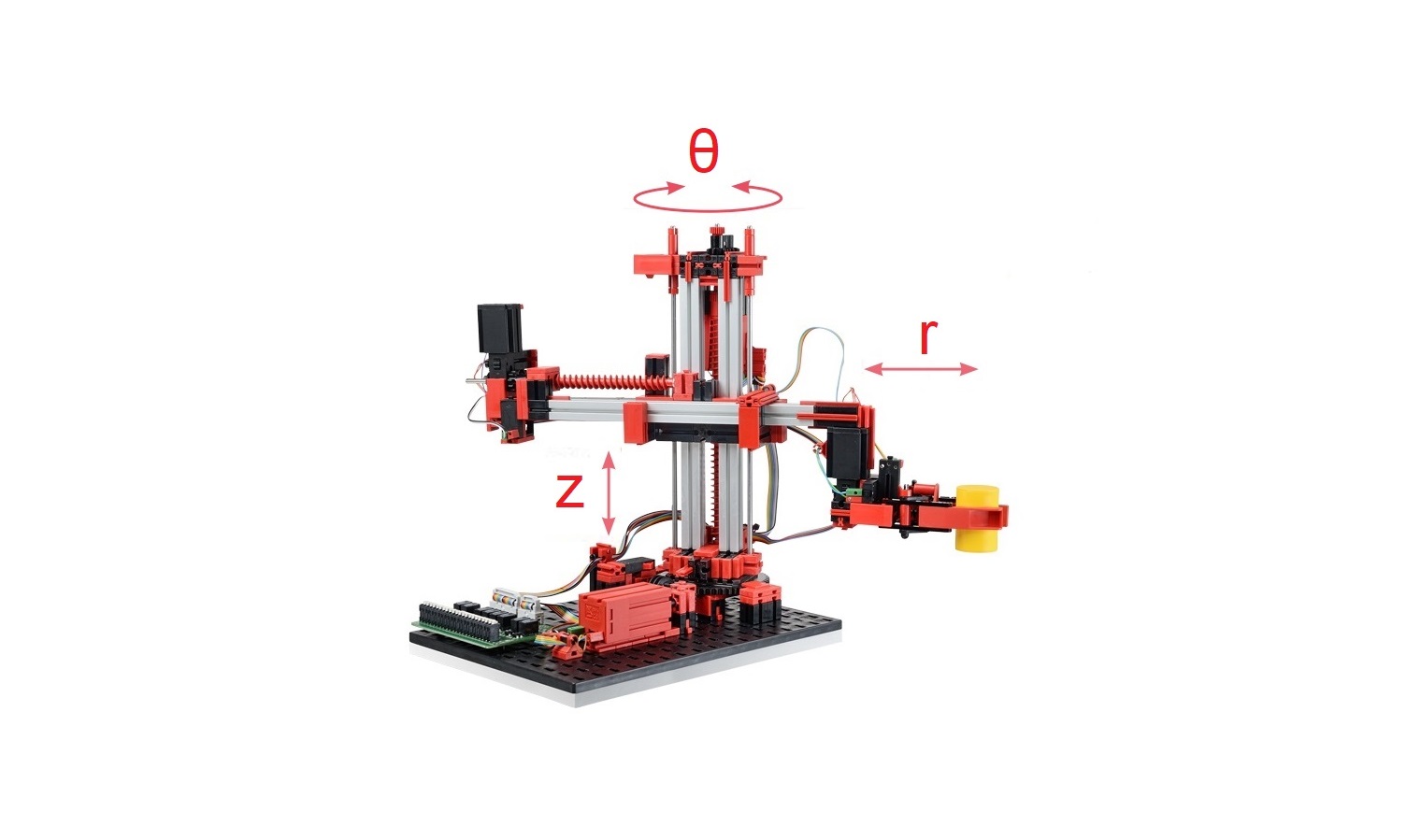
Antonio Pollola | Il robot oggetto di sperimentazione è il Robot TX 24V della Fischertechnik. Si tratta di uno strumento dotato di 3 assi di movimento e di una pinza di presa. Posiziona i pezzi in dotazione in modo rapido e preciso nello spazio tridimensionale. Il modello può essere combinato con nastro trasportatore, punzonatrice e linea di trasporto.
Essendo il robot dotato di attuatori a 24V CC, con relativi encoder, si è ritenuto opportuno adottare come apparecchio di comando e controllo un PLC. La scelta sul modello è stata praticamente obbligata in quanto già presente nei laboratori di elettronica: Siemens S7-1200 con CPU 1214.
Prima di procedere allo sviluppo del progetto, si è optato per lo spostamento del robot su una base più ampia che potesse contenere, oltre al robot stesso, il PLC e un deviatore di comando ciclo.

Durante la programmazione, effettuata in KOP, le principali difficoltà riscontrate hanno riguardato i motorI discesa-salita e rotazione oraria-antioraria che assorbono una potenza maggiore rispetto a quella di ogni singola uscita del PLC. Si è ovviato al problema mettendo in parallelo due uscite per ogni motore.
Per completezza si riportano i dettagli tecnici del sistema:
Robot a 3 assi con dispositivo di presa.
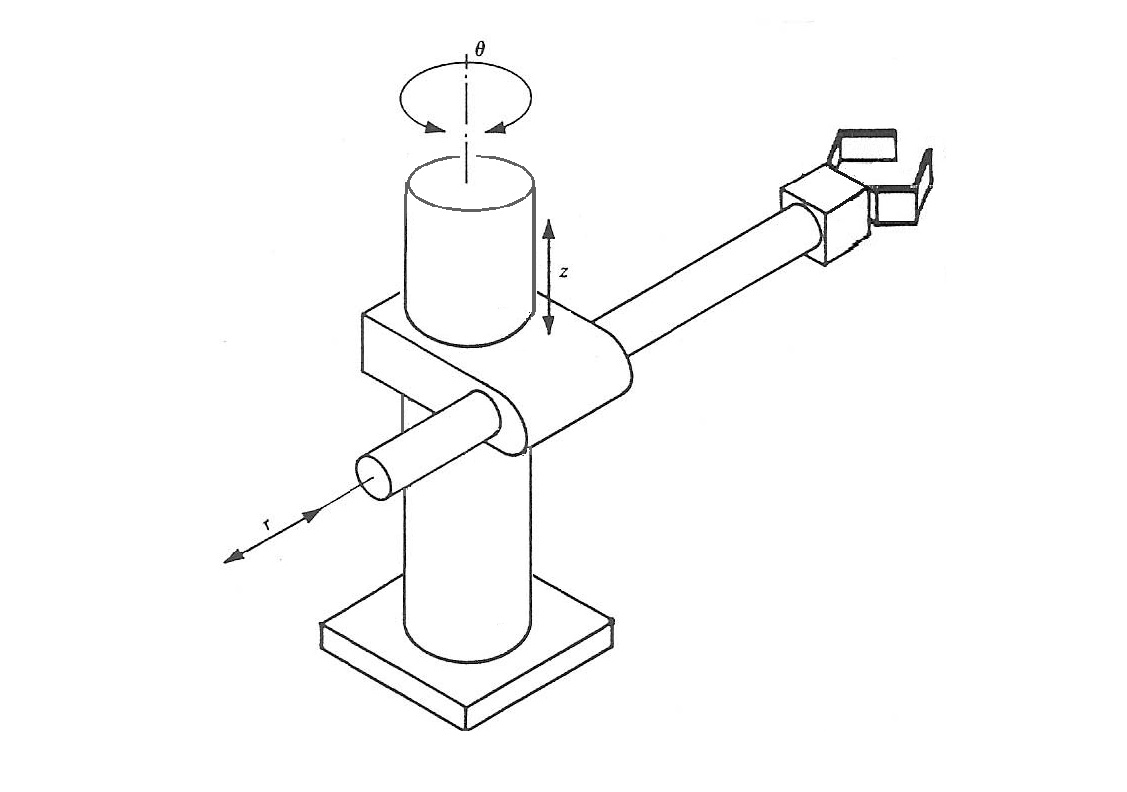
Gradi di libertà:
θ
: rotazione 180 °
r : avanti/indietro 90 mm
z : su/giù 150 mm
Ingressi/uscite, attuatori e sensori:
4 motori DC, di cui 2 con encoder magnetico integrato (Frequenza impulsi max: 1 kHz)
4 finecorsa, 2 sensori di impulsi per la misurazione del percorso
8 ingressi digitali
8 uscite, 24 V (4 motori rotazione oraria/antioraria, scheda relè per inversione polarità motore)