Tipi di manipolatori
A. Costantini | (la videolezione) Il primo robot industriale nasce nel 1959 per mano di George Devol e Joseph Engelberger ed ha un peso di circa due tonnellate, decisamente troppo pesante se confrontato con quelli oggi installati nelle isole robotizzate. La prima installazione in una linea industriale avviene nel 1961 alla GM Ternstedt a Trenton, nel New Jersey. Alla fine degli anni ’60 i robot industriali approdano anche in Europa e inizia una diffusione concreta di questo strumento. Tuttavia, si tratta di strutture di acciaio con motori idraulici lenti ed imprecisi. I gradi di libertà e le capacità di carico dei primi robot erano limitate e le prime applicazioni industriali si registrarono nel campo automobilistico. Infatti, i robot erano dotati di pinze di saldatura per saldare ed assemblare le scocche delle auto. I primi esempi di impiego massiccio furono quelli della Nissan in Giappone e della Fiat (1972) in Italia, dove vennero usati diversi robot per la saldatura sulle vetture, un’invenzione italiana adottata, in seguito, da tutte le industrie automobilistiche. È chiaro quindi che, nonostante le evidenti limitazioni iniziali, i grandi imprenditori della storia furono in grado di vedere le infinite potenzialità di questi strumenti e da allora la loro evoluzione non si è mai fermata. Oggi i robot svolgono in campo industriale lavorazioni accurate come forature, pallettizzazione, stoccaggio, asservimento CNC, smerigliatura, fresature, verniciature, smaltature e tagli con il laser, specialmente in aree di lavoro difficili, salvaguardando così la salute degli operai. Nell’evoluzione dei robot industriali hanno avuto un ruolo importantissimo alcuni dei brand che hanno investito risorse nella ricerca e nello sviluppo e che normalmente integriamo nelle nostre linee automatizzate e isole robotizzate: KUKA, ABB, Kawasaki, FANUC. Tra di loro spicca anche una realtà tutta italiana: Comau, attualmente una delle più grandi società al mondo di robotica industriale.
Classificazione dei manipolatori
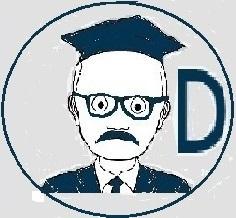
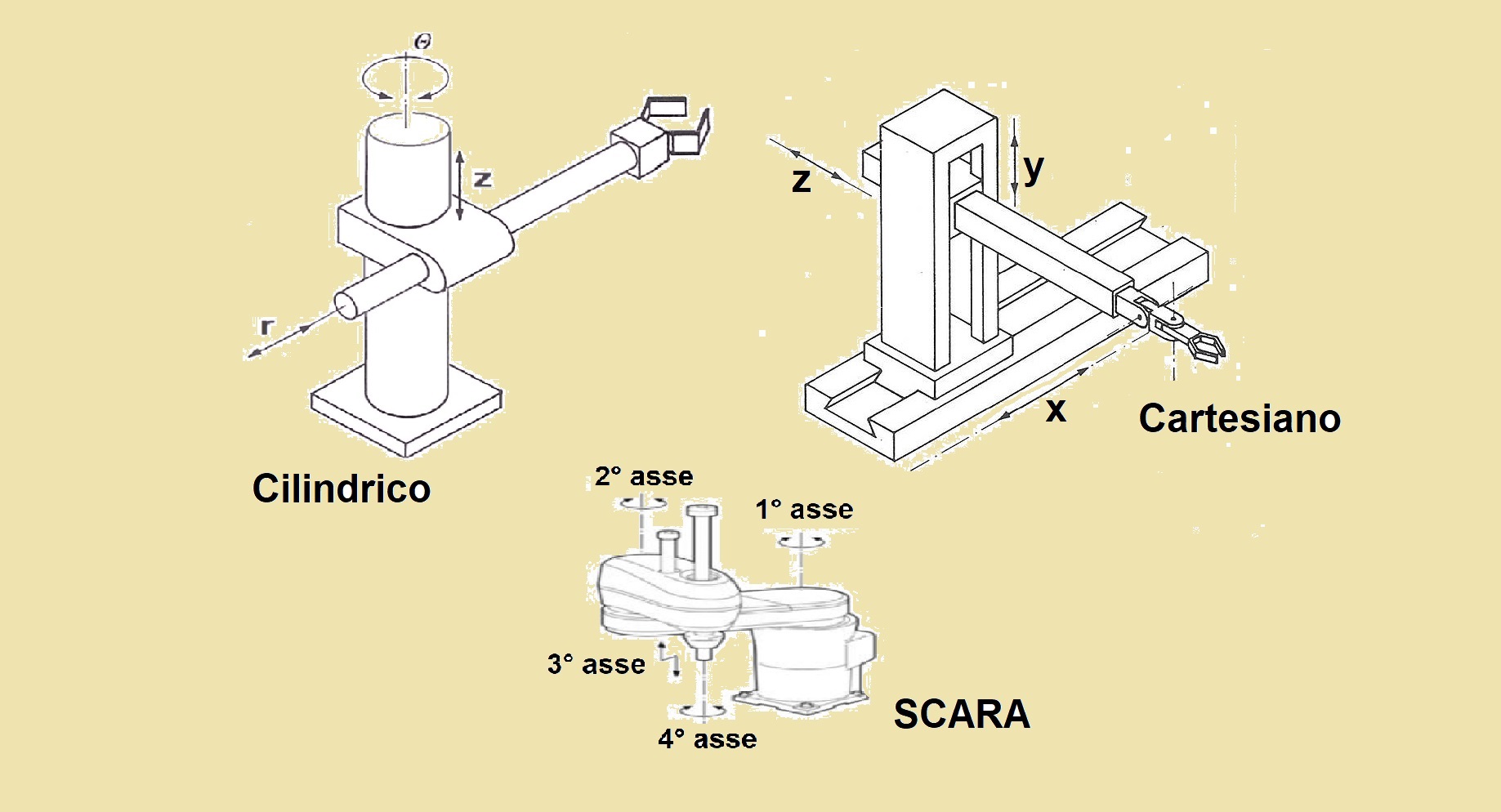
- Robot cartesiani (robot a portale, robot xyz o ICS = Integrated Combination System): sono una combinazione di due o più assi elettrici lineari o rotanti. Per questo, sono il tipo di robot con la cinematica più semplice e facile da comandare. Ogni asse ha un solo grado di libertà.
-
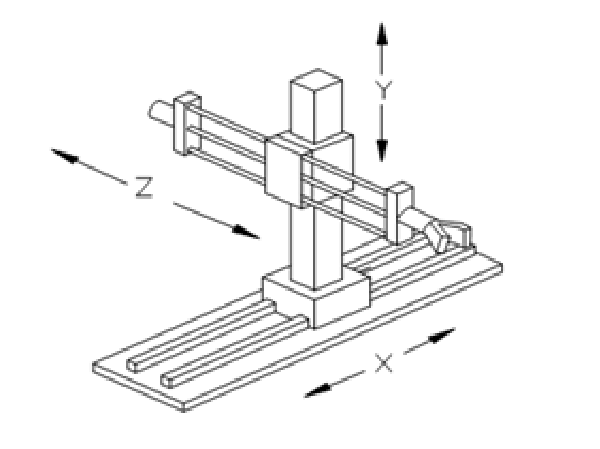
Robot cilindrici – La geometria Cilindrica é realizzata con un giunto rotoidale e due giunti prismatici. Sono composti da un braccio orizzontale, scorrevole su un asse verticale, montato su una base rotante.


- Robot antropomorfi (o articolati) a 6 assi: è il robot più flessibile. Con 6 gradi di libertà, è in grado di riprodurre pressoché tutti i movimenti di un braccio umano, compresi quelli della mano. Per questo motivo, anche per le funzioni di movimento più complesse, spesso è sufficiente un’unica macchina. È indicato nelle operazioni di movimentazione e/o montaggio in punti a coordinate x,y,z estremamente varie tra loro. È molto diffuso nel settore automobilistico per il montaggio e la saldatura dei pezzi, ma trova impiego in qualsiasi campo industriale.
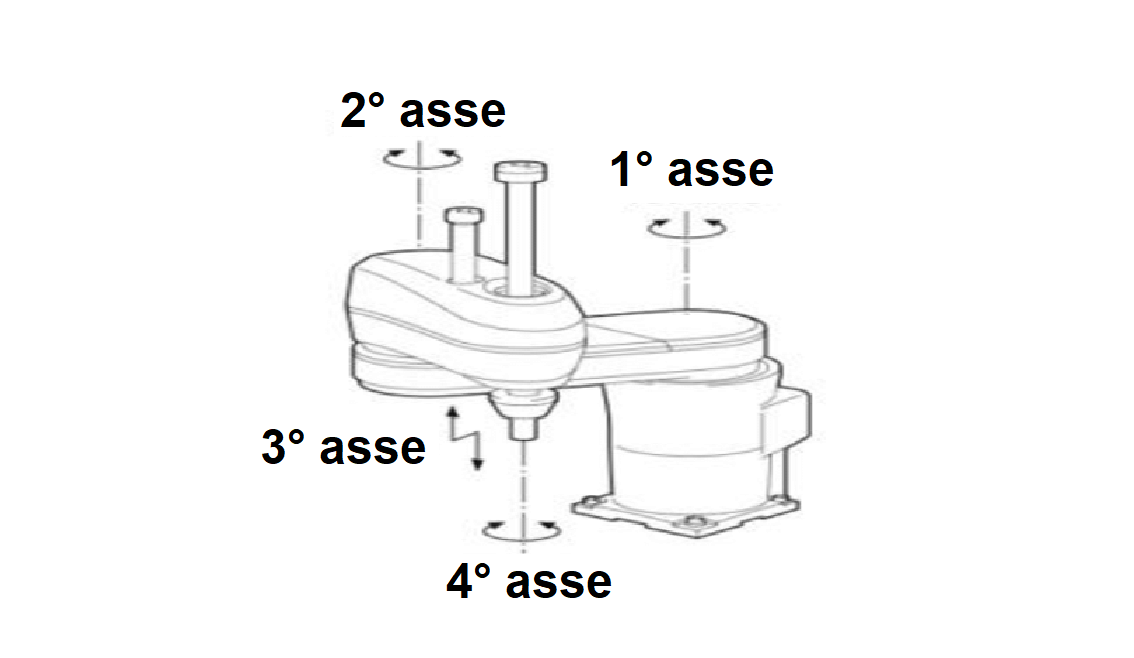
- Robot SCARA (acronimo di Selective Compliant Assembly Robot Arm): è un robot concepito per operazioni veloci e precise. È nato all’inizio degli anni ’70 in seguito all’osservazione secondo la quale i cicli di movimento più frequenti sono realizzabili con 4 assi (= 4 gradi libertà). Il vantaggio che presenta questo tipo di robot rispetto ad altri è dovuto al fatto che per sollevare un pezzo il movimento avviene su un solo asse. Il che ne semplifica la struttura rendendolo più affidabile. In un piano orizzontale si muovono 2 bracci articolati, incernierati ad una estremità con un asse verticale fisso, mentre all'altra estremità libera si trova un asse Z. Rispetto a quest’ultimo asse è possibile muoversi verticalmente e ruotare.

- Robot Delta: questo tipo di robot consiste in tre bracci collegati da giunti universali alla base. La caratteristica chiave del design è nei bracci, che mantengono l’orientamento del dispositivo di estremità. È progettato appositamente per ottimizzare la velocità e la versatilità delle operazioni di prelievo e movimentazione a velocità elevata di piccoli componenti in svariati settori, tra cui quelli alimentare, farmaceutico ed elettronico. I robot Delta esistono con 3, 4 o 6 assi. La loro struttura unica, a cinematica parallela, e il perimetro di lavoro molto ampio li rende candidati ideali per applicazioni di automazione più complesse. Garantiscono accelerazione rapida e velocità elevata e sono caratterizzati da straordinari livelli di prestazioni che consentono di mantenere al minimo il numero di robot richiesti su una linea e di limitare il layout produttivo.
Accanto ai robot, esiste un’altra categoria molto speciale che è quella dei robot collaborativi o Cobot: sono tipologie di robot concepiti per lavorare a contatto con l’uomo. Il modello più conosciuto è sicuramente lo Yumi di ABB. È una tipologia che spesso viene utilizzata in ambito medico/farmacologico. Per essere un cobot, il fabbricante o l’integratore di robot deve rispettare una serie di norme specifiche. I cobot in genere, infatti, possono muoversi intorno alle persone solo a determinate velocità, non possono surriscaldarsi e devono evitare il contatto umano fermandosi o cambiando direzione.